
:quality(80)/p7i.vogel.de/wcms/d0/38/d038131cc6e38229f78ec3f9510c9cef/rapidtech-203d-fachgespr-c3-a4ch-3000x1687.jpeg "Die Rapid.Tech 3D findet in diesem Jahr zum 20. Mal statt. (Bild: Christian Seeling/Messe Erfurt)")
:quality(80)/p7i.vogel.de/wcms/0a/ca/0aca76f0f5aeb7b8aa71ddfe1ba4c3b9/revalize-software-3304x1860.jpeg "Unternehmen, die entwerfen, modellieren, entwickeln und verkaufen, können mit den Lösungen Revalize bessere Ergebnisse erzielen. (Bild: Revalize)")
:quality(80)/p7i.vogel.de/wcms/d4/bf/d4bffabaeeb433d5944a1d63ddb90160/adobestock-486971989-5612x3154.jpeg "(Bild: Xometry Europe GmbH)")
:quality(80)/p7i.vogel.de/wcms/78/f3/78f398a781d1703891e5ac9b32b41598/idta-treffen-2711x1526.jpeg "V.l.n.r.: Dr. Niels Syassen (Sick), Jürgen Heimbach (Cadenas), Dr. Frank Possel-Dölken (Phoenix Contact), Norbert Gemmeke (Harting), Dr. Mark Krieg (Bosch Rexroth), Klaus Löckel (Siemens), Gerhard Borho (Festo), Dr. Heiner Lang (Wago), Meik Billmann (IDTA) und Rainer Brehm (Siemens) haben auf der Hannover Messe 2024 weitere Schritte für die Umsetzung des interoperablem Digitalen Zwilling abgestimmt. (Bild: IDTA)")
:quality(80)/p7i.vogel.de/wcms/f3/9c/f39c16be30fccda88aa494f3bdb2a250/-dsc0871-1600x900.jpeg "Am 21. März 2024 hat Meusburger seine Kunden zum exklusiven Branchentreff nach Hohenems eingeladen. (Bild: Meusburger )")
:quality(80)/p7i.vogel.de/wcms/9e/3a/9e3ab3604f797ac319fad53b08e110bc/arch-motorcycle-landscape-1500x843.jpeg "Arch verbindet handwerkliches Können und Ingenieurskunst mit Präzisionstechnologien und maximiert dadurch das Leistungspotenzial seiner Motorräder. (Bild: Arch Motorcycle)")
:quality(80)/p7i.vogel.de/wcms/dd/94/dd94abe217cd99c88727fe2f7af9f037/1-1-mitsubishi-electric-fachpressetage-2024-sustainable-metal-recycling.jpeg "(Quelle: Mitsubishi Electric Europe B.V.)")
:quality(80)/p7i.vogel.de/wcms/d6/93/d693f93fe28e2aab9b6390f839357291/siemens-simcenter-e-machine-design-02.png "(Quelle: Siemens Digital Industries Software)")
:quality(80)/p7i.vogel.de/wcms/d1/f1/d1f1b5ee0bc0b5aa42221a31b5fea16a/tu-20graz-1336x751.jpeg "Jörg Moser (links) und Christian Ellersdorfer vom Institut für Fahrzeugsicherheit der TU Graz. (Bild: Lunghammer - TU Graz)")
:quality(80)/p7i.vogel.de/wcms/c2/d0/c2d0e7866f7a8347de3e6e43a9ce18cd/01-wittenstein-fts-antriebssystem-2600x1463.jpeg "Das FTS-Antriebssystem Cyber iTAS System 2 besteht aus Aktuator und Servoregler. (Bild: Wittenstein SE)")
:quality(80)/p7i.vogel.de/wcms/c1/5b/c15bc9839ea82520ab5ab6e9fd77964c/f-press-release-aaa-fn-2024-03-3c-1000x562-999x562.jpeg "Auf seinem Messestand demonstriert Pilz, wie Anwender mit „Key in Pocket“ gleich eine Vielzahl unterschiedlicher Schutztüren sicher, flexibel und zeitsparend managen können. (Bild: Easyfairs GmbH)")
:quality(80)/p7i.vogel.de/wcms/92/53/9253037b3e2a535cb7f51c0784834d94/bild-flexline-203500-20mcc-20-28quelle-20rockwell-20automation-29-1137x640.png "Flexline 3500 MCC von Rockwell Automation liefert wichtige Daten in Echtzeit. (Bild: Rockwell Automation)")
:quality(80)/p7i.vogel.de/wcms/39/66/396679df8866ee8e9ee3f691fa6c4c08/strategic-partnership-festo-phoenix-contact-full-b5000-5000x2814.png "Von links nach rechts sind folgende Personen abgebildet: Ulrich Leidecker, COO, Phoenix Contact; Gerhard Borho – Vorstand Information Technology and Digitalisation, Festo; Thomas Böck – Vorstandsvorsitzender, Festo, sowie Frank Stührenberg, CEO, Phoenix Contact. (Bild: Phoenix Contact)")
:quality(80)/p7i.vogel.de/wcms/74/b1/74b1df2e6351192ac8c951f5cdb5c084/garchinaussenansicht-4320x2430.jpeg "Mehr als 100 Millionen Euro Investition für neues Technology Center in Garching stärkt Siemens die Spitzenforschung und den Standort Deutschland. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/15/11/15118c1434ac342c07c7666adea161da/pci23-1036-2850x1602.jpeg "In erstmals vier Messehallen – und damit einer mehr als 2023 – sowie auf einer Fläche von über 38.000 m², präsentieren sich mehr als 600 ausstellende Unternehmen. Davon sind 60 Prozent international und repräsentieren insgesamt 33 Länder. (Bild: Mesago Messe Frankfurt GmbH & Uwe Mühlhäußer)")
:quality(80)/p7i.vogel.de/wcms/7c/9a/7c9a0edeadd604a7fca4236bb207c93e/wibu-pr-flecs-web-1200x675.jpeg "Mit der CodeMeter-Technologie von Wibu-Systems und dem Flecs Marketplace werden industrielle Anwendungen modernisiert. (Bild: Wibu-Systems)")
:quality(80)/p7i.vogel.de/wcms/c8/6a/c86a9ebad226a43d067fbe5e1824b6ae/bearb-aufmacher-booster-20--20digitalisieren-20sie-20ihre-20ce-prozesse-blacksalmon-20via-20istock-1898x1067.jpeg "Beim Umstieg von der Maschinenrichtline auf die neue Maschinenverordnung können Unternehmen durchstarten und ihre CE-Prozesse digitalisieren. (Bild: BlackSalmon/iStock)")
:quality(80)/p7i.vogel.de/wcms/58/1a/581a442180e139806ee4c5efde1d5300/h-c3-bcngsberg-20e-rechnung-800x450.png "Die E-Rechnung gilt für B2B-Unternehmen ab dem 1.1.2025 grundlegend als verpflichtend. (Bild: ©iStock.com/jittawit.21)")
:quality(80)/p7i.vogel.de/wcms/37/16/3716d454cd92a7c09e3bf633f63321c5/de-2024-02-800-phoenix-contact-aufmacher-930x523.jpeg "Sichere und nachhaltige Digitalisierung in der
Thermoprozesstechnik.
(Bild: Nimit Ketkham/Shutterstock.com)")
:quality(80)/p7i.vogel.de/wcms/11/ed/11edc3e69ff3609cf257974c8de65fcc/240322-crc-1265x712.jpeg "Mehr als 60 IT-Dienstleister ließen sich für die Durchführung des CyberRisikoChecks schulen. (Bild: BSI)")
:quality(80)/p7i.vogel.de/wcms/a2/94/a29415f8532642020c9ed6f4ff925f3a/hm2024-13-0432-3600x2025.jpeg "Für Bundeswirtschaftsminister Robert Habeck ist die Hannover Messe das „Zugpferd des beginnenden Aufschwungs“ in Deutschland und Europa. (Bild: Deutsche Messe AG)")
:quality(80)/p7i.vogel.de/wcms/97/27/97279e8511410d9327df3a24a6075f13/ifm-pm-20773-20print-4000x2250.jpeg "Florian Deter (links), Geschäftsführer Microsoft Deutschland, unterzeichnet mit Michael Marhofer, CEO ifm, eine Kooperationsvereinbarung auf der Hannover Messe 2024. (Bild: ifm/Microsoft)")
:quality(80)/p7i.vogel.de/wcms/ad/fd/adfd7b78c2e194ca43ed256448cf14e3/ar-alliance.jpeg "(Quelle: Microoled)")
:quality(80)/p7i.vogel.de/wcms/9f/e1/9fe195fbe5e41a46c6f19a2908c45085/3spin-learning-1.jpeg "(Quelle: 3spin Learning)")
:quality(80)/p7i.vogel.de/wcms/69/b4/69b40a329d1c329315351c6973f9dcd2/dmitry-adobestock-401232340-1.jpeg "(Quelle: Dmitry/stock.adobe.com)")
Automatisierung: In vier Schritten von der Idee bis zur Anwendung
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/127700/127792/65.png "MPDV_Logo_2019.png ()")
Unternehmen fit machen für Produktion der Zukunft: Mit diesem Leistungsversprechen präsentiert sich das Fraunhofer IPA vom 27. bis 30. Juni 2023 auf der Messe Automatica. Gäste erleben dort Anwendungen rund um Robotik, Automatisierung, Künstliche Intelligenz (KI) und Reinraumtechnologien.

Das Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA präsentiert sich auf der diesjährigen Automatica mit elf Exponaten, die zeigen, wie Unternehmen Automatisierungslösungen auf höchstem Niveau umsetzen können. Das Angebot ist vielfältig: Es richtet sich an Unternehmen mit bestehenden Anwendungen, die diese optimieren möchten, und an Unternehmen, die ganz neue Anwendungen realisieren möchten. Für jeden Projektabschnitt gibt es Exponate, die dazu befähigen, eben jenen Abschnitt erfolgreich umzusetzen.
Schritt 1: Machbarkeit technisch und wirtschaftlich einschätzen
Viele Unternehmen möchten automatisieren, befürchten jedoch technische und wirtschaftliche Fehleinschätzungen. Hierfür bietet das Fraunhofer IPA bereits seit Jahren die Automatisierungs-Potenzialanalyse (APA). Das Entwicklerteam der APA geht für dieses kompakte Projektformat direkt in die Unternehmen, analysiert den Status quo und ermittelt eine objektive „Fitness for Automation“ der untersuchten Produktionsprozesse. Die APA wurde bereits bei über 500 Kunden weltweit für vielfältige Automatisierungsprojekte rund um die Montage eingesetzt. Jetzt ist sie auch für Schweißprozesse verfügbar. „Unternehmen erhalten so eine systematische Entscheidungsgrundlage, die das Investitionsrisiko signifikant verringert“, erklärt Lorenz Halt, Gruppenleiter am Fraunhofer IPA.
Bisher war die APA an das Fachwissen der Expertinnen und Experten am Fraunhofer IPA gekoppelt. Zur Messe steht sie auch als App beim Lizenzpartner Evia zur Verfügung. Unternehmen können somit selbst eine Anwendung analysieren, die sie möglicherweise automatisieren möchten. Neben den Anwendungen Montage und Schweißen erarbeitet das Team aktuell auch eine APA für das Maschinenbeladen sowie für die Logistik.
Auch außerhalb von Produktionshallen ist oft mehr Automatisierung gewünscht. Deshalb widmet sich eine Gruppe am Fraunhofer IPA der Entwicklung einer robusten, autonomen Outdoor-Navigation für die Herausforderungen typischer Outdoor-Umgebungen. Outdoor-Intralogistik, Landwirtschaft oder Forst sind Beispiele potenzieller Umgebungen. Am Messestand wird der prototypische Outdoor-Roboter Curt_mini vorgestellt. Verbunden ist das Exponat mit einem Beratungsangebot rund um den sinnvollen Einsatz von autonomen mobilen Robotern (AMR) in Innen- wie Außenbereichen.
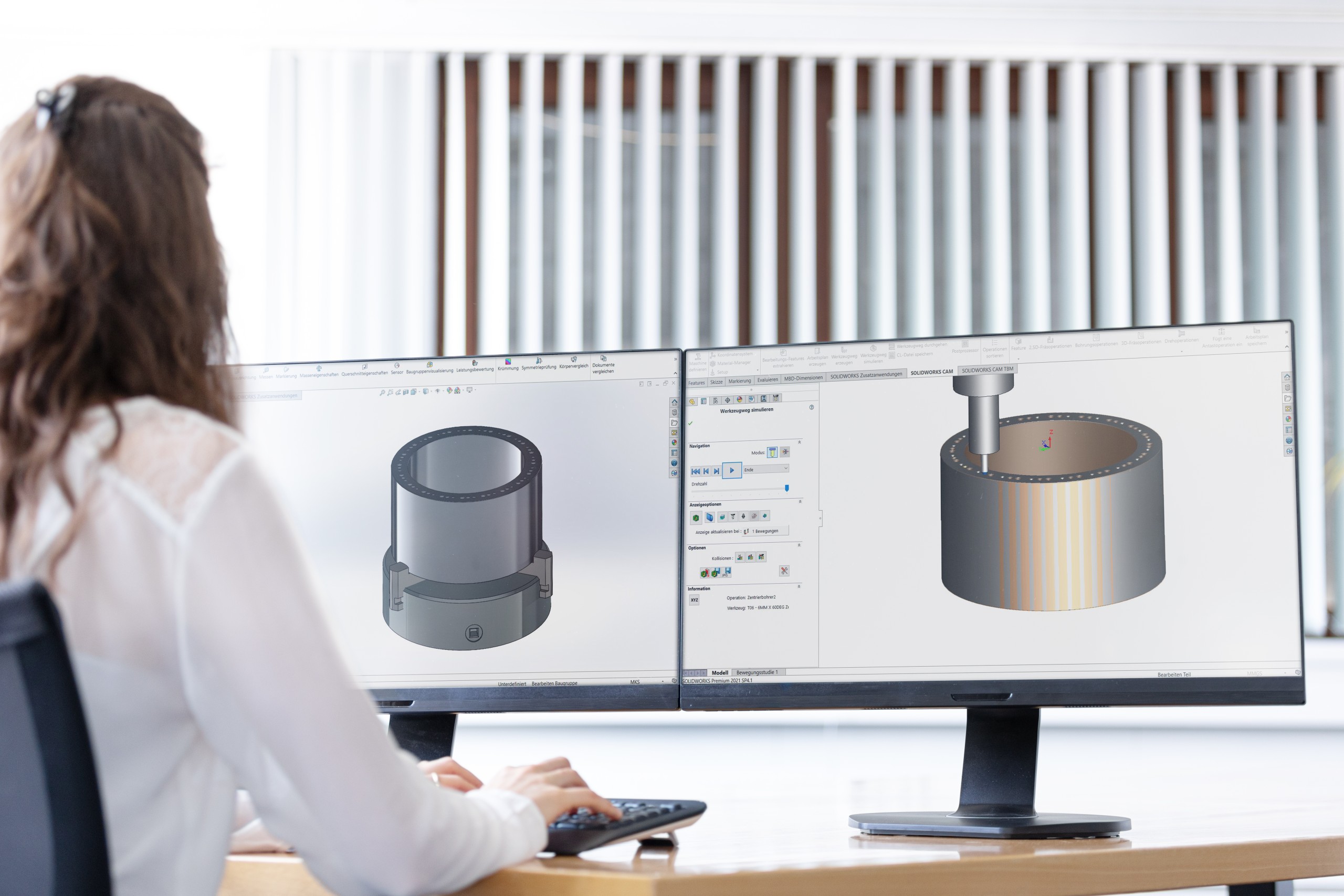
Vom Feld zurück in die Produktionshallen geht es mit dem Exponat DesignChain: Es adressiert die aktuelle Anforderung, dass die Industrie zunehmend kundenindividuelle Produkte kostengünstig und in immer kürzerer Zeit produzieren muss. Um dabei im weltweiten Wettbewerb bestehen zu können, empfiehlt sich die sogenannte DesignChain. „Das bedeutet, dass die technische Auftragsabwicklung von der Bestellung bis zum fertigen Produkt durchgehend digitalisiert ist“, so Jonas Krebs, Mitentwickler des Exponats. Die Aufwände für die Fertigungsvorbereitung halbieren sich dadurch. Gäste am Fraunhofer-Stand können mithilfe des Exponats ein individuelles Produkt konfigurieren, das in der Folge als CAD-Modell erzeugt, fertigungsgerecht simuliert und anschließend für den 3D-Druck eingeplant wird.
Schritt 2: Tragfähige Konzepte erstellen
Die „Robo-Dashcam“ erfasst datenschutzkonform sicherheitsrelevante Daten und Personen, während die Roboterzelle in Betrieb ist. Basierend auf diesen Daten kann dann das Sicherheitskonzept nachträglich angepasst werden, um die Performance beziehungsweise Taktzeit der Anwendung zu steigern. „Wir messen die optimierte Roboterleistung und können Sicherheitsabstände reduzieren. So zeigen wir die Effektivität unserer Robo-Dashcam“, teilt Aulon Bajrami vom Fraunhofer IPA mit, der die Anwendung mitentwickelt hat. Bis zu zehn Prozent mehr Produktivität und eine um 54 Prozent reduzierte Zeit für die Risikobeurteilung sind möglich.
Die Robo-Dashcam ist Teil von CARA (Computer-Aided Risk Assessment), mit dem das Institut Unternehmen dabei unterstützt, Sicherheitskonzepte systematisch und teilautomatisiert zu erstellen und Performance-Verbesserungen zu ermöglichen. Da das Institut bereits seit 15 Jahren in der internationalen Normung aktiv ist, fließen in all seine Entwicklungen auch die neuesten Erkenntnisse aus dieser Gremienarbeit ein.
Mit dem geplanten Spin-off „intRAC“ (intelligent Robotic Assemby Cell) bietet das Fraunhofer IPA insbesondere für die wirtschaftliche Kabel- und Steckermontage eine modulare Automatisierungslösung, auch für kleine Losgrößen. „Unser Angebot geht auf die Bedürfnisse kleiner und mittelständischer Unternehmen ein, indem die modulare Roboterzelle flexibel und schnell an verschiedene Produkte angepasst werden kann. Dies ermöglicht den Unternehmen bereits mit einem System verschiedene Varianten zu fertigen und damit planbare Investitionsentscheidungen zu treffen“, so Arik Lämmle aus dem Gründerteam. Damit richtet sich intRAC direkt an Betriebe, die meist kein Wissen über Roboter besitzen und die besonders stark vom Fachkräftemangel und hohen Lohnkosten betroffen sind.
Schritt 3: Technische Machbarkeit experimentell oder simulativ absichern
Ist die grundsätzliche Idee abgesichert und liegt ein Konzept zur Anwendungsrealisierung vor, geht es um das Prüfen der Machbarkeit. Auch zu diesem Projektschritt bietet das Fraunhofer IPA beispielhafte Exponate am Stand.
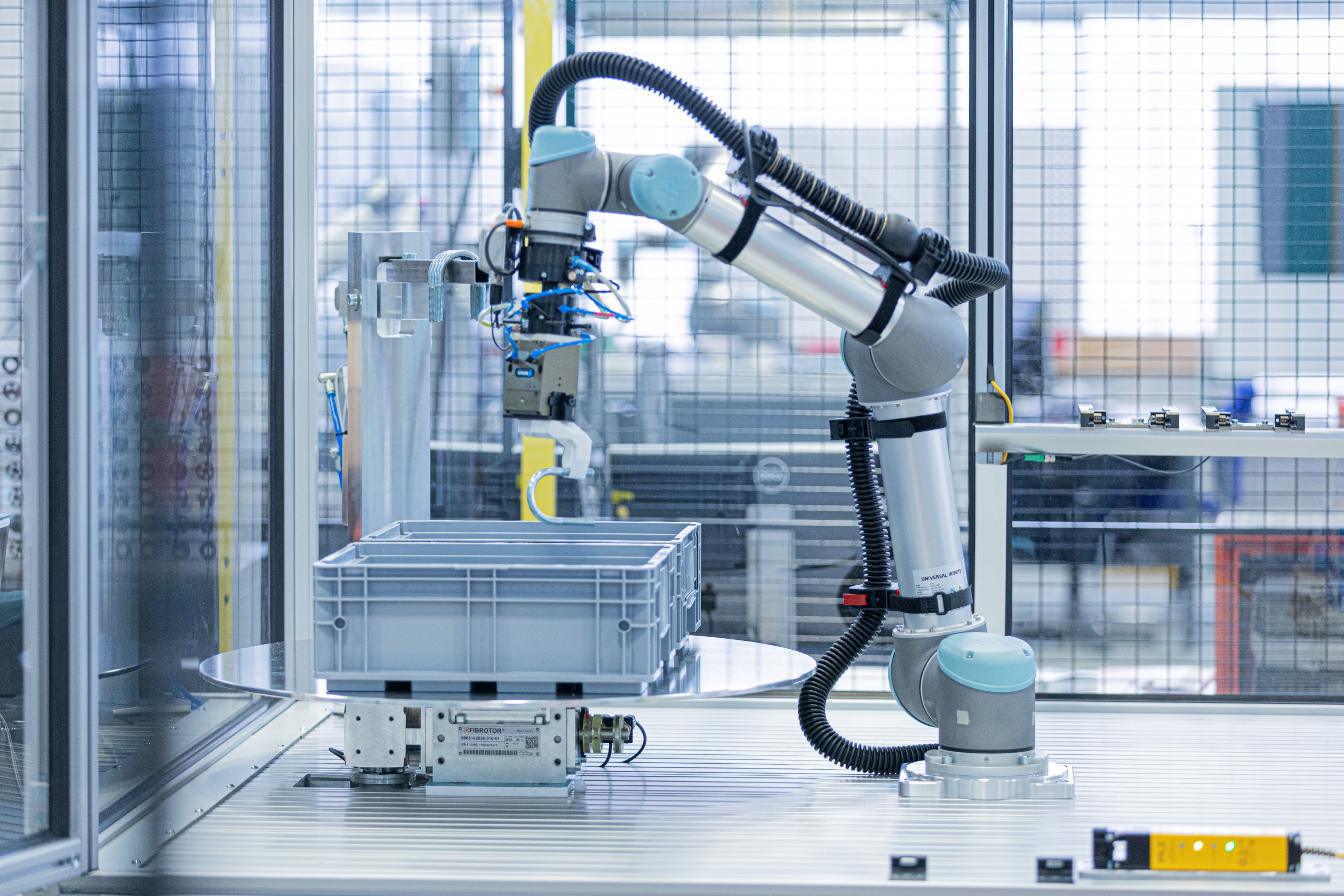
Eines davon ist „AI Picking“, der KI-basierte Griff-in-die-Kiste. Damit adressiert das Entwicklerteam des Fraunhofer IPA genau die technischen Hürden, die eine umfassende Nutzung des Griff-in-die-Kiste trotz hohem wirtschaftlichem Potenzial noch immer hemmen. „Der Einsatz von KI, oder genauer von deren Teilgebiet Maschinellem Lernen, macht die Anwendung autonomer, schneller und robuster“, beschreibt Mitentwickler Marius Moosmann vom Fraunhofer IPA die KI-basierten Mehrwerte. Wie das konkret aussieht, zeigt das zweigeteilte Exponat. Der eine Teil mit klassischem Griff-in-die-Kiste führt vor, wie Objekte aus Kisten mit gemischtem Inhalt zuverlässig erkannt und gegriffen werden. Zudem werden Verhakungen automatisch erkannt und die Entnahmebahn des Roboters so geplant, dass sich die Verhakung löst. Der andere Teil zeigt, wie unterschiedliche Gebinde auf einer sortenreinen Palette erkannt und gegriffen werden. Ein Roboter schichtet die Gebinde passend um.
Das Exponat zum „Bin Packing“ führt vor, wie das Ablegen in eine Kiste vollautomatisiert möglich wird. Tim Nickel, Mitentwickler der Anwendung, erklärt deren Vorteile: „Ohne zuvor eingelernte Daten zu den Objekten kann das Robotersystem Freiformen platzsparend und ohne Packmuster oder Vorkommissionierung greifen und sauber in einen Karton ablegen. Wir erreichen hiermit eine fünf Prozent höhere Verpackungsdichte und das bei deutlich reduzierten Vorbereitungsaufwänden.“ Die Gäste können auf dem Messestand mit dem Roboter interagieren, indem sie ihm ein Objekt anreichen und dieser es ohne Vorbereitung greift und einpackt. Auch für das Bin Packing sind Machbarkeitsstudien in Simulationen möglich.
Schritt 4: Konzepte in der Produktion implementieren
Schließlich bietet Fraunhofer auch umfangreiche Möglichkeiten zur finalen Realisierung einer Anwendung. Wie das aussehen kann, zeigt das Fraunhofer IPA beispielhaft mit drei Exponaten.
So adressiert die Software „Pitasc“ eine häufige Hürde für die Montageautomatisierung, nämlich die Variantenvielfalt, die bisher mit hohen Programmieraufwänden einhergeht. Diese Aufwände machen den Einsatz von Robotik schnell unwirtschaftlich. Genau hier setzt die Software an: Hier muss eine Montageaufgabe nicht mehr Punkt für Punkt programmiert werden. Stattdessen erfolgt die Programmierung relativ zum Werkstück strukturiert und modular basierend auf Daten, die Sensoren am Roboter liefern. Vorgefertigte, wiederverwendbare Programmmodule helfen dabei, insbesondere knifflige, kraftgeregelte Montage-anwendungen schneller als bisher umzusetzen und ermöglichen eine effiziente Anpassung an neue Varianten.
Einen anderen Ansatz für eine bessere Planung und Durchführung einer Montage verfolgt eine Ausgründung des Fraunhofer IPA. Das Start-up entwickelt die auf Künstlicher Intelligenz (KI) basierende Software „Assemblio“ Assembly Suite, die CAD-STEP-Dateien analysiert und auswertet. Jedes CAD-System kann diese informationsreichen Dateien generieren. Sie liefern der „3D-Analyse-KI“ alle notwendigen Informationen, um strukturierte Montageinformationen präzise abzuleiten. Eine zweite Komponente ist der „Assembly Composer“, der die extrahierten Montageinformationen einliest und in ein Tool für die Montageplanung einspeist. Das Tool zeigt montagerelevante Informationen vereinfacht grafisch an, sodass die Montage spielend einfach und fehlerfrei planbar ist. Die KI-Montageassistenz „KIM“ erstellt automatisch und kostengünstig Montageassistenzen zur interaktiven Unterstützung des Personals. Die Assistenz ist variabel und kann 2D- oder 3D-basiert sein.

Ein drittes Beispiel ist das Reinraumsystem CAPE. Dies ist ein flexibles Reinraumsystem, das eine Luftreinheit der ISO-Klassen 1 bis 9 realisiert. Ähnlich wie bei Zelten lässt sich das CAPE-System innerhalb weniger Stunden beziehungsweise Tage aufbauen und in Betrieb nehmen. In den vergangenen Jahren haben die Wissenschaftlerinnen und Wissenschaftler das CAPE zu einer ganzen Produktfamilie erweitert. „Neuestes Familienmitglied ist unser DryClean-CAPE. Es schafft nicht nur eine reine Produktionsumgebung, sondern gleichzeitig auch eine mit sehr geringer Luftfeuchtigkeit, beispielsweise einem Taupunkt von -50 Grad Celsius“, erklärt Frank Bürger, Gruppenleiter am Fraunhofer IPA.
Lesen Sie auch: Hier kann der Maschinenbau noch was lernen
:quality(80)/p7i.vogel.de/wcms/87/79/8779466a480f6f4e0448df9a3d7baa78/de-2023-02-301-sanipa-1.jpeg "de-2023-02-301-sanipa-1 (Quelle: Toolcraft)")
:quality(80)/p7i.vogel.de/wcms/fa/ac/faac401293ea132f052362133e6f21b3/flexiblemanufacturingdemo-copyright-omron.jpeg "flexiblemanufacturingdemo-copyright-omron (Quelle: Omron)")